慣性モーメント
平行軸の定理の検証
棒の場合
平行軸の定理,をいろいろな形状で検証していきましょう.
平行軸の定理,自体の導出は前ページにあるように比較的簡単に検証できたので,改めて検証する必要は全くありませんが....まあせっかく計算したので...
・棒の場合
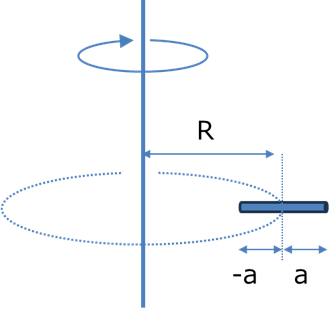
重心が半径Rの位置にあり,2aの棒の慣性モーメントを求めてみましょう.
線の場合の密度の定義は,線密度として,長さ2aの場合,
\( \Large \displaystyle M= 2a \rho \)
です.回転中心を線の重心,x座標でいうと0,とすると,
\( \Large \displaystyle J= \int_{R-a}^{R+a} x^2 \rho \ dx = \rho \left[ \frac{x^3}{3} \right]_{R-a}^{R+a} \)
を計算すればいいのです.
\( \Large \displaystyle J= \rho \left[ \frac{x^3}{3} \right]_{R-a}^{R+a}
= \left[ (R^3 + 3R^2 a + 3R a^2 + a^3) - (R^3 - 3R^2 a + 3R a^2 - a^3) \right]
\)
\( \Large \displaystyle = \frac{\rho}{3} ( 6R^2a + 2a^3) \)
\( \Large \displaystyle = \frac{M}{6a} ( 6R^2a + 2a^3) \)
\( \Large \displaystyle = MR^2 + \frac{1}{3} M a^2 \)
となり,第一項が平行軸の定理,第二項が重心を中心に回転する棒の慣性モーメントとなり,平行軸の定理と一致します.
・棒の場合-斜め_01
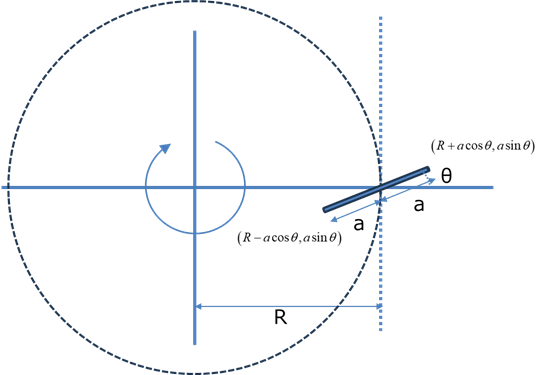
斜めの棒の場合を考えます.回転面に対して角度θで斜めとなる場合です.
上の図は回転軸上から見た図となります
長さ2aの棒の両端の座標は,回転中心を原点とすると,
\( \Large \displaystyle ( R + a \ cos \theta, a \ sin \theta )\)
\( \Large \displaystyle ( R - a \ cos \theta, -a \ sin \theta)\)
となるので,棒の各位置の座標は,
\( \Large \displaystyle x = R + s \ cos \theta \)
\( \Large \displaystyle y = s \ sin \theta \)
\( \Large \displaystyle ( -a \leq s \leq a )\)
となります. 回転中心からの距離は,
\( \Large \displaystyle r = \sqrt{ (R + s \ cos \theta)^2 + ( s \ sin \theta )^2 }\)
\( \Large \displaystyle = \sqrt{ R^2 + 2 R \ s \ cos \theta + s^2 \ cos^2 \theta + s^2 \ sin^2 \theta }\)
\( \Large \displaystyle = \sqrt{ R^2 + 2 R \ s \ cos \theta + s^2 }\)
となります.
線の場合の密度の定義は,線密度として,長さ2aの場合,
\( \Large \displaystyle M= 2a \rho \)
ですので,慣性モーメントは,
\( \Large \displaystyle J = \int_{-a}^a \left( \sqrt{ R^2 + 2 R \ s \ cos \theta + s^2 } \right)^2 \rho \ ds \)
\( \Large \displaystyle J = \int_{-a}^a \left( R^2 + 2 R \ s \ cos \theta + s^2 \right) \rho \ ds \)
\( \Large \displaystyle J = \rho \ \left[ R^2s + Rs^2 \ cos \theta + \frac{s^3}{3} \right]_{-a}^a \)
第二項は0となるので,
\( \Large \displaystyle J = \rho \ \left[ R^2s + \frac{s^3}{3} \right]_{-a}^a \)
\( \Large \displaystyle J = \rho \ \left[ 2R^2a + \frac{2 a^3}{3} \right] \)
\( \Large \displaystyle J =\frac{M}{2a} \ \left[ 2R^2a + \frac{2 a^3}{3} \right] \)
\( \Large \displaystyle J =MR^2 + \frac{1}{3} Ma^2 \)
となり,第一項が平行軸の定理,第二項が重心を中心に回転する棒の慣性モーメントとなり,平行軸の定理と一致します.
次ページは,回転軸に対して斜めの棒の平行軸の定理の検証,を検討していきます.
![]()
![]()
![]()